
Reading an Image From a Local Camera
lesson
Most computers today have a built-in camera. Let’s look at how we can grab images directly from such a camera and put them in the MATLAB workspace.
lesson
Most computers today have a built-in camera. Let’s look at how we can grab images directly from such a camera and put them in the MATLAB workspace.
lesson
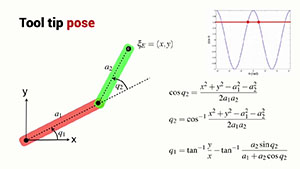
We revisit the simple 2-link planar robot and determine the inverse kinematic function using simple geometry and trigonometry.
lesson
We learn how to describe the 3D pose of an object by a 4×4 homogeneous transformation matrix which has a special structure.

lesson
The orientation of a body in 3D can also be described by two vectors, often called the approach and orientation vectors.

lesson
A problem arises when using three-angle sequences and particular values of the middle angle leads to a condition called a singularity. This mathematical phenomena is related to a problem that occurs in the physical world with mechanical gimbal systems. Note that in Robotics, Vision & Control (second edition) and RTB10.x the default definition of roll-pitch-yaw […]

lesson
Time varying coordinate frames are required to describe how the end-effector of a robot should move to grab an object, or to describe objects that are moving in the world. We make an important distinction between a path and a trajectory.

lesson
We will learn how to create coordinate frames that have smoothly changing position and orientation over time.

lesson
We extend the idea of relative pose, introduced in the last lecture, to 3D. We learn another right-hand rule that indicates the direction of rotation about an axis, and we see how we can attach 3D coordinate frames to objects to determine their pose in 3D space.

lesson
We revisit the fundamentals of 3D geometry that you would have learned at school: coordinate frames, points and vectors.

lesson
We revisit the fundamentals of geometry that you would have learned at school: Euclidean geometry, Cartesian or analytic geometry, coordinate frames, points and vectors.