
Velocity of 6-Joint Robot Arm – Translation
lesson
For a real 6-link robot our previous approach to computing the Jacobian becomes unwieldy so we will instead compute a numerical approximation to the forward kinematic function.
lesson
For a real 6-link robot our previous approach to computing the Jacobian becomes unwieldy so we will instead compute a numerical approximation to the forward kinematic function.

lesson
We consider a robot, which has two rotary joints and an arm.

lesson
We repeat the process of the last section but this time consider it as an algebraic problem.

lesson
A number of strategies exist to reduce the effect of these coupling torques between the joints, from introducing a gearbox between the motor and the joint, to advanced feedforward strategies.

lesson
We will learn about how we make the the robot joints move to the angles or positions that are required in order to achieve the desired end-effector motion. This is the job of the robot’s joint controller and in this lecture we will learn how this works. This journey will take us in to the […]

lesson
A robot manipulator may have any number of joints. We look at how the shape of the Jacobian matrix changes depending on the number of joints of the robot.

lesson
To move a robot smoothly from one pose to another we need smooth and coordinated motion of all the joints. The simplest approach is called joint interpolated motion but it has some limitations.

lesson
A robot joint controller is a type of feedback control system which is an old and well understood technique. We will learn how to assemble the various mechatronic components such as motors, gearboxes, sensors, electronics and embedded computing in a feedback configuration to implement a robot joint controller.
lesson
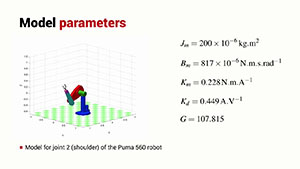
We will use Simulink to create a dynamic model of a single robot joint and simulate its operation.

lesson
A robot joint is a mechatronic system comprising motors, sensors, electronics and embedded computing that implements a feedback control system.